|
  .png)
W przygotowaniu

nr 5-6(25-26) 2017
dostępny
po 29.12.2017
Wydanie aktualne

nr 3-4(23-24) 2017
dostępny w pdf, wydanie
flash
tutaj
Wydania
archiwalne

nr 1-2(21-22) 2017
dostępny w pdf, wydanie
flash
tutaj

nr 1-2(19-20) 2015
dostępny w pdf, wydanie
flash
tutaj
2014_miniatur.png)
numer 1(18) 2014
dostępny w pdf, wydanie
flash
tutaj
2013_sm.png)
numer 1(17)
2013
dostępny w pdf, wydanie flash
tutaj
_covsmall.gif)
numer 1(16) 2012
dostępny
w
archiwum
2011_cover_small_ok.gif)
numer 1(15) 2011
dostępny
w
archiwum
cov_small.gif)
numer 4(14) 2010
HD dostępny
w archiwum
|

Czwartek, 9.10.2014 r.
Ścieżki bez modelu CAD?
We współczesnych czasach może
budzić to u niektórych zdumienie, ale przecież maszyny
obróbcze sterowane numerycznie nadal bardzo często (jeśli nie
najczęściej) programowane są przez technologów, którzy w tym
celu nie korzystają z modeli CAD, gotowego kodu NC, ale
wprowadzają parametry na podstawie np. papierowej
dokumentacji, za pomocą panelu operatora. Okazuje się, że
można to robić jeszcze inaczej. Jak? Ucząc roboty...
Firma VMT oferuje nową metodę (VRT
– Virtual Robot Teach-in), uhonorowaną nagrodą ROBOTICS AWARDS,
do innowacyjnego i intuicyjnego uczenia złożonych ścieżek
robotów. W porównaniu z wykorzystywanymi obecnie procesami
programowania za pomocą panelu operatora lub wskaźników, nowa
metoda pozwala na uczenie robota za pomocą jednej ręki –
łatwiej i szybciej. Z drugiej strony proces uczenia może być
wykonywany bezpośrednio na rzeczywistym detalu, nawet poza
celą robota.
Główną zaletą niniejszej metody w
porównaniu z programowaniem offline jest fakt, że model CAD
przedmiotu nie jest potrzebny do stworzenia ścieżki. Niemniej
jednak połączenie obu metod (VRT + programowanie offline)
zmniejsza przestoje, więc wydajność robotów może być
zwiększona.
Zdaniem przedstawicieli firmy,
nowa metoda VRT jest intuicyjna, szybka, łatwa i dokładna.
Wydawać by się mogło, że ww. cechy nawzajem się wykluczają,
tymczasem istotnie okazuje się, że VRT zwiększa wydajność
robota, redukuje czas potrzebny na programowanie, czy pozwala
na dodatkowe rozwiązania, jak pomiar celi robota lub
docelowego TCP. Jak przebiega Virtual Robot Teach-in?
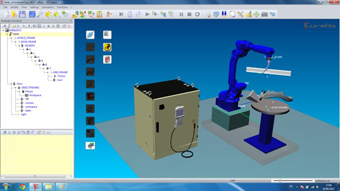
1. Generowanie ścieżki
narzędzia

Wyrównanie robota i kamery przez
wskazanie 3 punktów współrzędnych. Wskazywanie punktów na
planowanej ścieżce robota i ruchy ruch wirtualnego robota na
ekranie – sprawdzenie osiągalności (zakresów ruchów) i
kolizji. Nagrywanie pozycji i wektorów ruchów z rzeczywistego
detalu przez dotknięcie i wskazanie pojedynczych punktów lub
tryb ciągły pracy wskaźnika.
2. Symulacja i optymalizacja
Przeprowadzanie symulacji całej
ścieżki, która może być modyfikowana, zmieniana lub
optymalizowana – w zależności od wymagań, jak również
parametrów procesu
3. Uruchomienie procesu

Wygenerowana ścieżka jest
przetwarzana przez postprocesor i wysyłana bezpośrednio przez
eternet (lub pośrednio przez pendrive USB) do układu
sterowania robota w celu wykonania procesu – pozwala to na
zachowanie kompatybilności z różnymi rodzajami robotów.
Więcej o rozwiązaniu można
znaleźć na stronach:
www.roboris.pl
i
www.3dmaster.com.pl.
Pokaz na żywo wirtualnej nauki
robotów już niebawem, w Warszawie!
Więcej informacji tutaj.
(ms)
Źródło: 3D Master

[ powrót na stronę główną
] |
Blog monitorowany
przez:

|





